Page Not Found
Page not found. Your princess is in another castle.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your princess is in another castle.
About me
This is a page not in the main menu
A game for PyWeek 29 
A game for ludumDare 46
A game for pyweek 31 
A game for pyweek 36. Ranked in the top 3! 
A group project with classmates
Robots for outreach 
Science outreach with the British Council 
Bristol’s entry to the Robosoft Locomotion Challenge in 2019 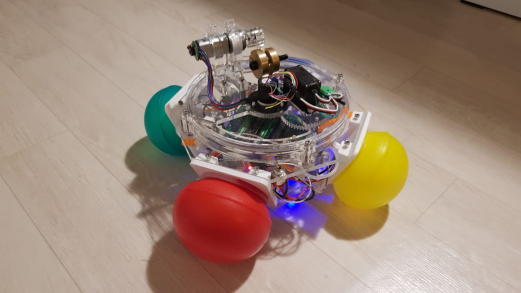
A gift for friends![]()
Published in Mobile Service Robotics, CLAWAR, 2014
Published in IEEE Robotics and Automation Letters, presented at IROS, 2017
Published in IEEE International Conference on Soft Robotics (RoboSoft), 2018
Published in Journal of the Royal Society Interface, 2018
Published in IEEE Robotics and Automation Letters. Presented at ICRA, 2019
Published in 10th International Conference on Robotics in Education, 2019
Published in IEEE International Conference on Soft Robotics (RoboSoft), 2019
Published in Soft Robotics, 2019
Published in IEEE International Conference on Soft Robotics (RoboSoft), 2020
Published in IEEE Robotics and Automation Letters (2021). Presented at ICRA 2021, 2021
Published in 3D Printing and Additive Manufacturing, 2021
Published in 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021
Published in SPIE Electroactive Polymer Actuators and Devices (EAPAD) XXIV, 2022
Published in Nature Communications, 2022
Published in 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
Published in 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
Published in Electroactive Polymer Actuators and Devices (EAPAD) XXV, 2023
Published in 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2023
A cable driven manipulator with multiple degrees of freedom 
For automated testing of soft skins in control tasks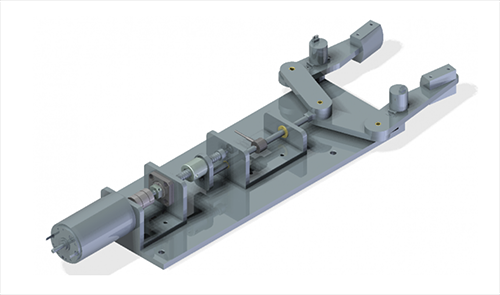
Investigated the design of mechanical structures using soft materials 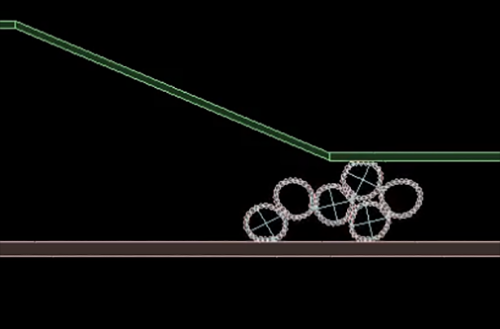
A legged robot capable of displaying personality through its movement 
Sketch by Maurizio Nitti and Alessia Marra
A method to simultaneously optimize design and control parameters for legged robots
A crawling robot made of soft materials 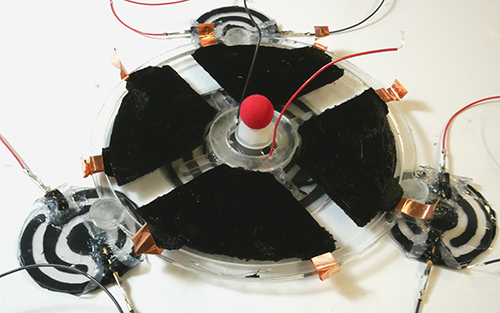
A microscopic IPMC manipulator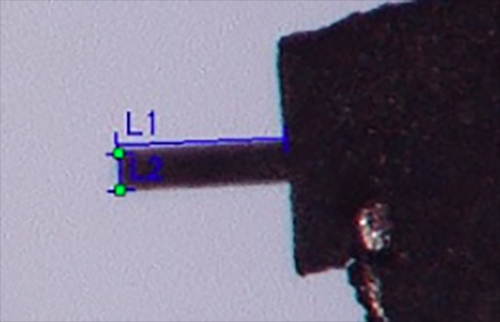
A proof of concept design of an implantable device 
Hyperelastic bellows inspired by euglenoids 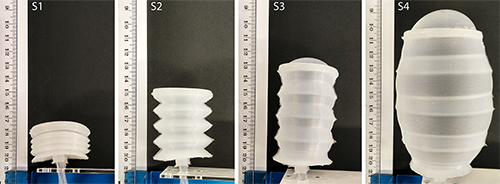
Replicating euglenoid movement in a soft robot 
Auxetics made with patterns 
Pellicle like surface for soft robots 
A mathematical description of dynamically changing shapes 
A discrete impedance tomography skin sensor 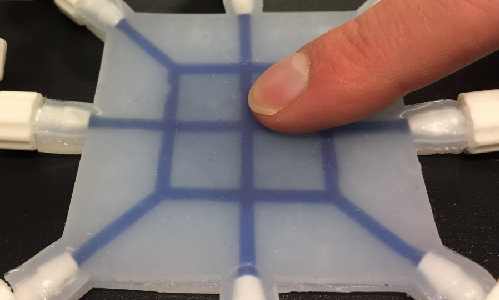
A wearable sensory feedback device for upper limb robotic prostheses 
A recipe for stimuli-responsive, self-healing soft robots made with gels 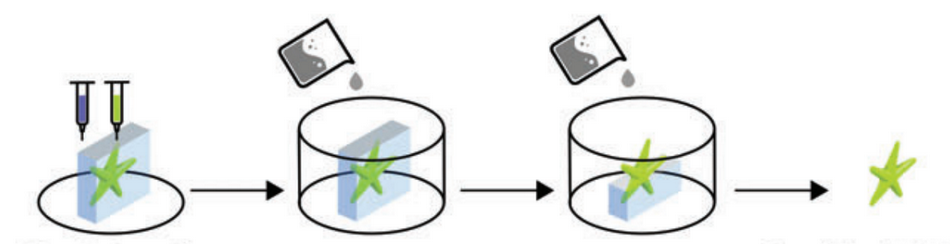
A new way to handle fragile materials 
A new way to change stiffness using electrostatics 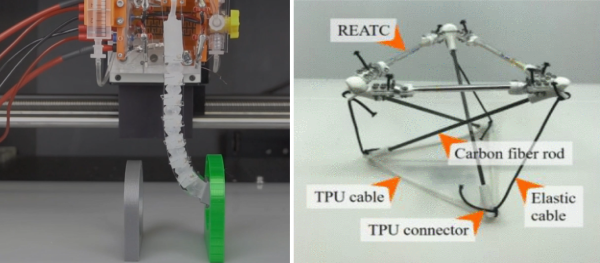
Low profile force sensors with robust performance 
A data driven approach to anticipate slip 
Improving stiffness of electrostatic clutches through geometry modification 
summer school, University of Bristol, 2017
I helped with the organisation of a robot programming session for the summer school at the University of Bristol. Students learnt to program Arduino based robots. I helped with the assembly and preparation of the robots. I was one of the two instructors who taught the students.
Undergraduate course, University of Bristol, 2017
I helped with the organisation of a tutorial in a course from the aerospace engineeing department. The students were tasked with building a glider. The designs were tested for flyability and endurance by tying them to a string and spinning them around a pole.
Graduate course, University of the West of England, Engineering Design and Mathematics, 2017
I was a teaching assistant on this course at the University of the West of England for the winter terms of 2016 and 2017. This graduate level course focuses on robot kinematics, intelligent control techniques, and programming.
Graduate course, EPFL, 2021
I was one an instructor on the robotics practicals course at EPFL with my colleague Yegor Piskarev. Students were trained on manufacturing artificial muscles based on dielectric elastomer actuators. They got a chance to both fabricate and characterise these actuators. We also taught them about electrostatic adhesion. At the end of the course, the students designed, tested and analysed their very own soft robot.
Graduate course, EPFL, 2022
I am assisting Prof. Dario Floreano and Dr. Euan Judd in teaching the Evolutionary Robotics course at EPFL. The course offers an introduction to evolutionary computation, its applications to neural computation, robot control, body-brain co-design, and evolutionary biology. Students are also exposed to open research topics that resort to evolutionary computation, such as self-repairing robots, self-reproducing robots, tensegrity robot control, and biohybrid robots. The course consists of ex-cathedra lectures, lab exercises with Phython, and a team project on co-evolution of robotic brains and bodies.
Masters course, QUT, 2023
This unit provides an understanding of the components that go toward creating a robot, how they work individually, and how they are organized into systems. I teach this unit with Dr. Thierry Peynot.
Masters course, QUT, 2023
This unit teaches principal aspects of robot motion, control and planning which is crucial in Robotics. It will provide an understanding of the dynamics, kinematics and control of both mobile and manipulator arm robots.
Masters course, QUT, 2024
The unit combines mechatronics engineering with entrepreneurship. It introduces students to fundamental entrepreneurial concepts and skills. Students will work in a team and apply their new knowledge in entrepreneurship to devise an idea for a robotic device that solves a problem for a client. They will identify and understand technical and non-technical client needs, with awareness of indigenous perspectives and the ethics of robots in society.
Masters course, QUT, 2024
This unit provides the foundations needed to understand how to represent quantities in two and three dimensions. Representation of position and orientation in 2D and 3D form the foundation of professional practice in robotics and AI. This foundation unit also presents key search algorithms used in most navigation tasks.