Electrostatic Clutches for Variable Stiffness
Electrostatic clutching is an attractive means of changing stiffness on demand. Exploiting the simple tendency of oppositely charged surfaces to attract each other, one can control stiffness, friction and a whole host of other mechanical properties by controlling the electric field.
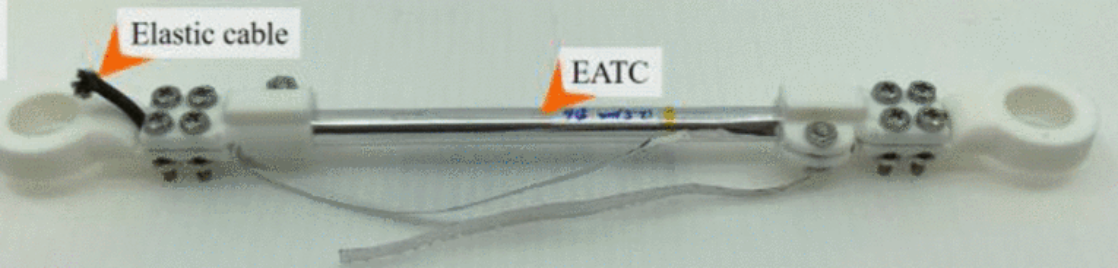
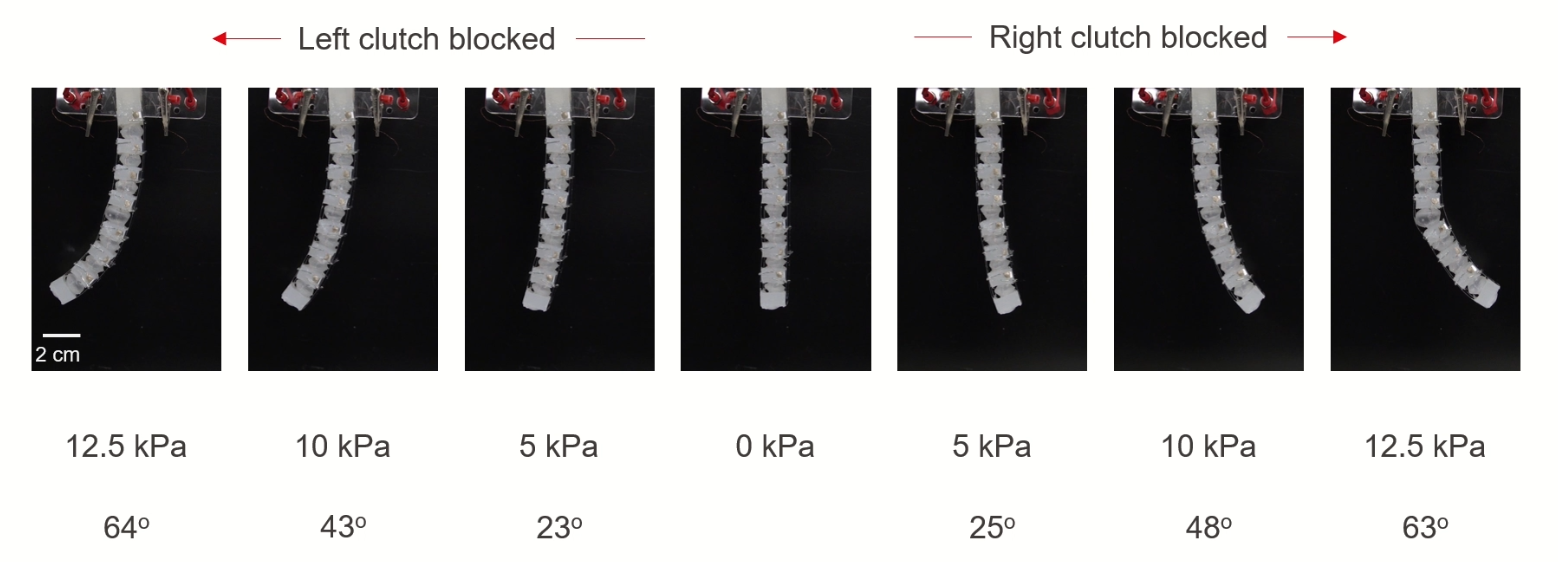
This idea was explored in two projects. In the first case (at LMTS, EPFL), to stiffen a pneumatic finger and in the second case (at LIS, EPFL) to stiffen a cylindrical member that is part of a tensegrity structure.
For more details, refer to the two publications listed below:
A variable stiffness soft gripper with integrated ion-drag pump, presented at the SPIE Electroactive Polymer Actuators and Devices (EAPAD) XXIV 2022. Details here.
Electro-Adhesive Tubular Clutch for Variable-Stiffness Robots, presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022. Link to the paper.