Giant Shape change for highly deformable soft robots
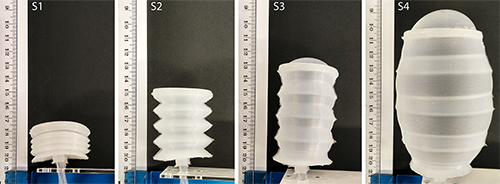
I looked at the design of a bioinspired actuator capable of achieving a large volumetric change, inspired by the changes in body shape seen in the euglena Eutreptiella spirogyra during its characteristic locomotion. I designed a novel soft pneumatic actuator exploits the hyperelastic properties of elastomers. We call this the hyperelastic bellows (HEB) actuator (top image).
I also fabricated a segmented robot with multiple chambers is presented, which demonstrates several of the characteristic shapes adopted by the euglenoid in its locomotion cycle (bottom image).
I presented this work at IROS 2017. Access the paper at IEEE Xplore or UoB PURE