Concurrent Optimization of Mechanical Design and Locomotion Control
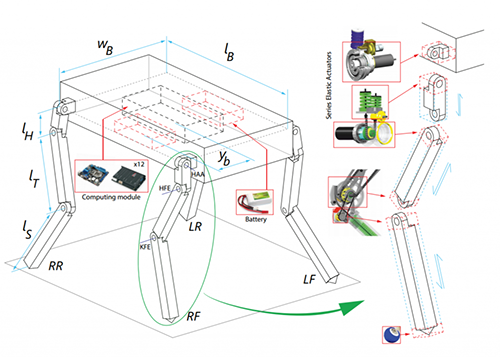
As part of my masters thesis at ETH Zurich in collaboration with Disney Research, I looked at improving the performance of the StarlETH robot in locomotion tasks. The core idea is that by simultaneous tuning of mechanical design and locomotion controllers, the performance of the robot can be optimised for a given task. In this case, the task was to follow a certain gait pattern (eg. trotting, bounding). The results of the co-optimisation show that the admissible top speed for a given gait can be increased while using the same actuation units.
I presented this work at the conference on climbing and walking robots (CLAWAR 2014). The paper can be accessed at the publisher’s page. The project can also be accessed on Disney Research’s database