Mechanical Design of a Gripper with Soft Skin
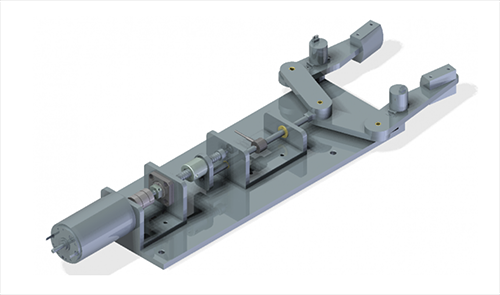
In this project with Dr. Jonas Buchli from the Ajile and Dexterous Robotics Lab, ETH and Prof. Stelian Coros, I designed a gripper to be used in the sutomated testing of soft skins. The idea was to drop a ball from a known height and let the gripper grasp it as it falls. The arms of the gripper were manufactured from soft material and the goal was to test how different materials performed.