Folding for stiffening
Improving stiffness of electrostatic clutches through geometry modification 

Improving stiffness of electrostatic clutches through geometry modification
A data driven approach to anticipate slip 
Low profile force sensors with robust performance 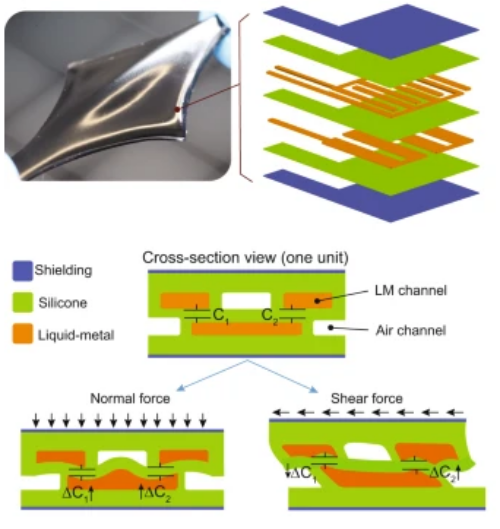
A new way to change stiffness using electrostatics 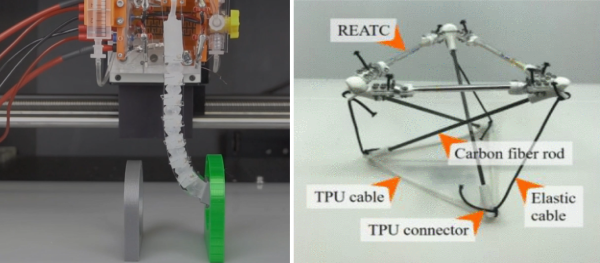
A new way to handle fragile materials 
A recipe for stimuli-responsive, self-healing soft robots made with gels 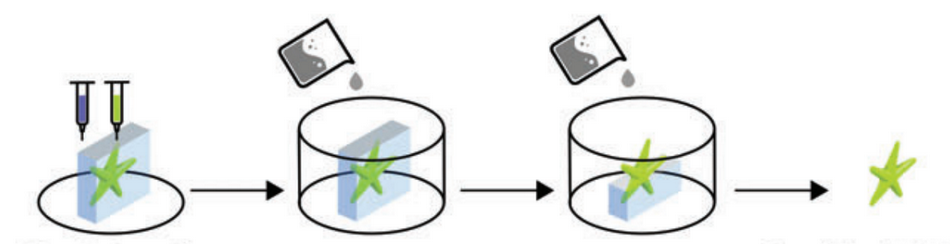
A wearable sensory feedback device for upper limb robotic prostheses 
A discrete impedance tomography skin sensor 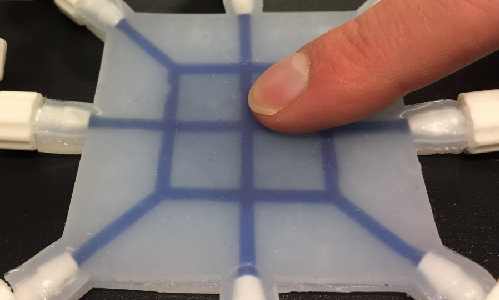
A mathematical description of dynamically changing shapes 
Pellicle like surface for soft robots 
Auxetics made with patterns 
Replicating euglenoid movement in a soft robot 
Hyperelastic bellows inspired by euglenoids 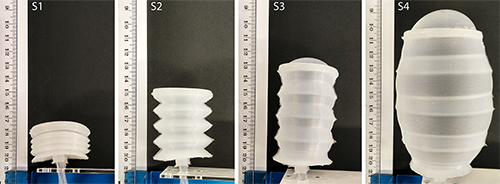
A proof of concept design of an implantable device 
A microscopic IPMC manipulator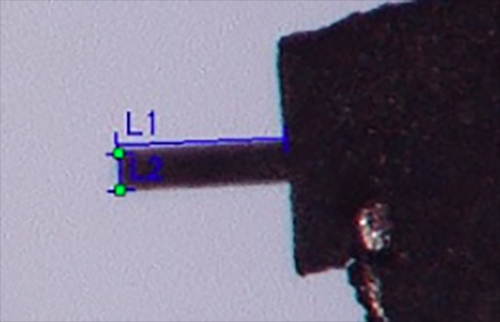
A crawling robot made of soft materials 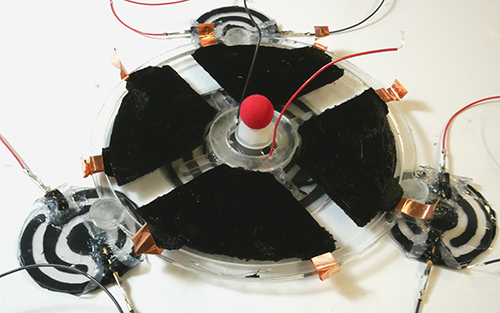
A method to simultaneously optimize design and control parameters for legged robots
A legged robot capable of displaying personality through its movement 
Sketch by Maurizio Nitti and Alessia Marra
Investigated the design of mechanical structures using soft materials 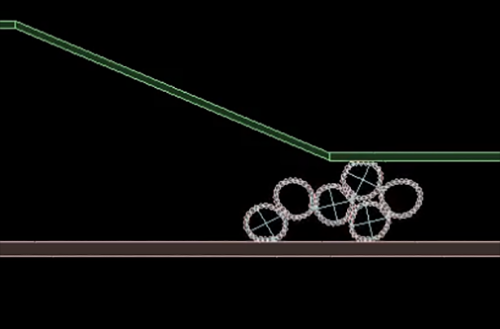
For automated testing of soft skins in control tasks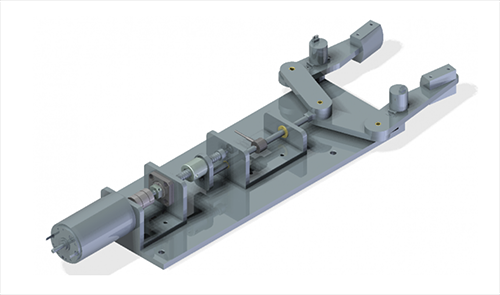
A cable driven manipulator with multiple degrees of freedom 